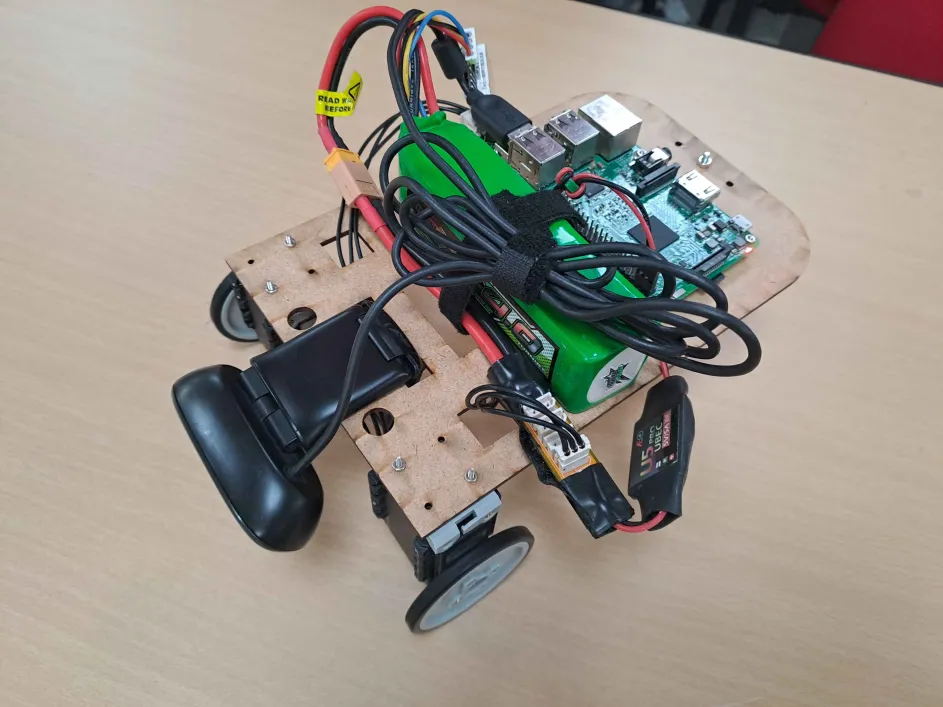
Robot frame design using CAD, laser-cut in wood for structural integrity and precision.
Deployment of a Raspberry Pi for computational processing and real-time decision-making.
Implementation of a line-tracking algorithm in Python, leveraging the Webcam C270 and OpenCV for trajectory recognition and correction.
Autonomous navigation towards predefined target positions, incorporating adaptive trajectory control.
Position estimation through odometry, utilizing MX-12W motor encoders to compute displacement and orientation.
Generation of environmental maps by integrating odometric data and computer vision-based perception.